| ubuntu 22.04上vim | 您所在的位置:网站首页 › vim plug安装 › ubuntu 22.04上vim |
ubuntu 22.04上vim
|
前言
最近,新配置了一版虚拟机,因为学校已经配置好环境的虚拟机忘了带回来,我还想系统的学习一下ROS,并将其用于机械臂的控制,因此用了新的方式配置了vim,并将树莓派raspberry buster系统配置上了ROS1的环境,虚拟机配置了ROS2的环境,这篇文章我先讲的是虚拟机的配置过程,较树莓派配置过程而言较为简单。 基础配置还是先下载驱动,后安装,内存最好在4GB到8GB左右,具体空间我设置成了100G,大家可以依据自己的需求进行改变,之后进入环境之后要换源和进行安装更新,网络不好就多更新几遍吧 尽量保证网络正常,可以爬取github上的东西 Vim-plug插件管理器的安装需要先下载curl工具,或者是直接下载压缩包再解压出其中的plug.vim文件 curl工具方式需要先安装curl sudo apt-get update sudo apt-get install curl之后执行如下命令 curl -fLo ~/.vim/autoload/plug.vim --create-dirs \ https://raw.githubusercontent.com/junegunn/vim-plug/master/plug.vim 下载plug.vim方式下载这个文件之后,执行如下命令 mkdir -p ~/.vim/autoload/ cp plug.vim ~/.vim/autoload/plug.vim Vim相关插件的下载与设置新建一个文件吧 vim ~/.vimrc把这些粘进去 call plug#begin() " The default plugin directory will be as follows: " - Vim (Linux/macOS): '~/.vim/plugged' " - Vim (Windows): '~/vimfiles/plugged' " - Neovim (Linux/macOS/Windows): stdpath('data') . '/plugged' " You can specify a custom plugin directory by passing it as the argument " - e.g. `call plug#begin('~/.vim/plugged')` " - Avoid using standard Vim directory names like 'plugin' " Make sure you use single quotes " Shorthand notation; fetches https://github.com/junegunn/vim-easy-align Plug 'junegunn/vim-easy-align' " Any valid git URL is allowed Plug 'https://github.com/junegunn/vim-github-dashboard.git' " Multiple Plug commands can be written in a single line using | separators Plug 'SirVer/ultisnips' | Plug 'honza/vim-snippets' " On-demand loading Plug 'scrooloose/nerdtree', { 'on': 'NERDTreeToggle' } Plug 'tpope/vim-fireplace', { 'for': 'clojure' } " Using a non-default branch Plug 'rdnetto/YCM-Generator', { 'branch': 'stable' } " Using a tagged release; wildcard allowed (requires git 1.9.2 or above) Plug 'fatih/vim-go', { 'tag': '*' } " Plugin options Plug 'nsf/gocode', { 'tag': 'v.20150303', 'rtp': 'vim' } " Plugin outside ~/.vim/plugged with post-update hook Plug 'junegunn/fzf', { 'dir': '~/.fzf', 'do': './install --all' } " Unmanaged plugin (manually installed and updated) Plug '~/my-prototype-plugin' " Initialize plugin system " - Automatically executes `filetype plugin indent on` and `syntax enable`. call plug#end() " You can revert the settings after the call like so: " filetype indent off " Disable file-type-specific indentation " syntax off " Disable syntax highlighting然后执行:PlugInstall命令,等待下载成功 相关命令如下 下载插件 :PlugInstall 下载新的插件 在call plug#begin()和call plug#end()之间添加一下新的插件 安装特定插件 :PlugInstall gist-vim 卸载插件 :PlugClean 更新vim-plug :PlugUpgrade 更新所有已经安装的插件 :PlugUpdate 查看插件状态 :PlugStatus 记得安装一下cmake吧,之后安装总用退回主目录,输入: sudo apt install cmake sudo apt-get install cmake-qt-gui 自动补全插件coc.nvim的安装先下载一下nodejs和npm sudo apt update sudo apt install nodejs npm查看一下版本 nodejs --version 版本太老怎么办,下载n这个工具吧 sudo npm install n -g sudo n stable在确定版本够新之后,设置一下环境变量 curl -sL install-node.now.sh/lts | bash在指定位置添加插件 " Use release branch (Recommend) Plug 'neoclide/coc.nvim', {'branch': 'release'}然后进入~/.vimrc文件,在命令行中输入:CocInfo 出现相关版本信息即为成功。 之后我们就可以通过这个页面配置相关语言的补全功能了,我这里配置一下python吧 打开这个网页: Language servers · neoclide/coc.nvim Wiki · GitHub 找到python的部分,发现是要安装coc-pyright这个插件 输入: pip3 install 'python-language-server[all]' vim ~/.vimrc :CocInstall coc-pyright Opencv安装这个库我基本在每个虚拟机上都会配置,主要是自己也是做视觉方面,也是经常使用 我们就按最简单的方式来吧,直接从ubuntu源码库安装,省时省力 sudo apt update sudo apt install libopencv-dev python3-opencv查看一下版本吧,此时版本为4.5.4 python3 -c "import cv2; print(cv2.__version__)" ROS2安装欢迎查看ROS2官方文档 https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html 先设置编码吧 sudo apt update sudo apt install locales sudo locale-gen en_US en_US.UTF-8 sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 export LANG=en_US.UTF-8然后查看一下设置的源 apt-cache policy | grep universe
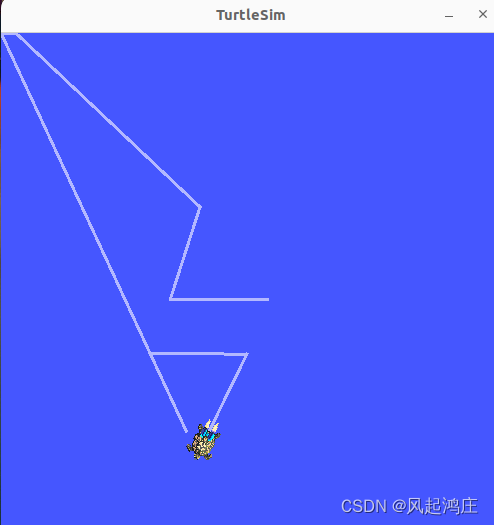
我这里设置的是阿里源 其他源应该和这个类似,release出的项大同小异 然后继续运行 sudo apt update && sudo apt install curl gnupg lsb-release sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null更新一下啦 sudo apt update sudo apt upgrade我们直接安装桌面版吧,就是时间会比较长 sudo apt install ros-humble-desktop之后我们可以设置一下环境变量 source /opt/ros/humble/setup.bash echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc 小海龟仿真分别开两个终端,输入 ros2 run turtlesim turtlesim_node ros2 run turtlesim turtle_teleop_key
其中第一句指令将启动一个蓝色背景的海龟仿真器,第二句指令将启动一个键盘控制节点
|
【本文地址】